ネットワーク協調型・自律移動システムの支援
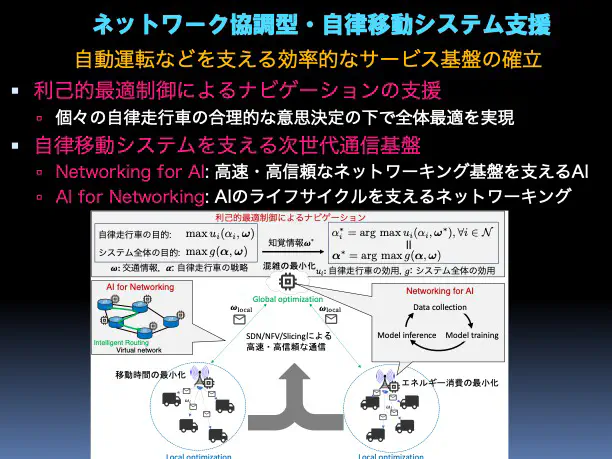
本研究では,自動運転に代表されるような自律型移動システムの効率的な運用をナビゲーション支援とネットワーキングの観点から目指している. まず,ナビゲーションにおいては,個々のユーザ(自律走行車)は自身の利得を最大化するように戦略を取る. 例えば,自身の移動時間を最小化するように交通情報を下に現在地から目的地までの最短のルートを設計し,移動する. その結果,ボトルネックとなる道路に車両が集まり,渋滞を引き起こすことになる1 2. これは全ユーザの利得の総和は低下することに繋がる. このような現象は,個々のユーザの合理的な意思決定の下での行動は,必ずしも全体最適とはならないことを示唆している. 本研究では,各ユーザが知覚する交通情報を制御することで,個々のユーザの合理的な意思決定の下で全体最適を実現する利己的最適制御3によるナビゲーション支援を確立することを目指す. このようなナビゲーションは歩行者支援などの応用も期待される.
一方で,効率的なナビゲーション支援を実現するためには,高速・高信頼な通信が必要不可欠となる. 近年,機械学習 (Machine Learing: ML) や人工知能 (Artificial Intelligence: AI) とネットワーキングを連携させる研究が進められており,その多くが効率的なネットワーク運用を実現している. 本研究では,AI for NetworkingとNetworking for AIのそれぞれの観点から,自律移動システムをバックエンドを支援するネットワーキング手法の検討を進める. このようなネットワーク運用を実現するためには,自律走行車や人々の移動を捉え,適切にネットワークサービスを提供できるようなモビリティ分析やシステムの設計などが必要となる. AI for Networking では,高速・高信頼なネットワーキング基盤を支えるAIをNetwork Functions Virtualization (NFV),Software Defined Networking (SDN),Network Slicingなどの仮想化技術に適用することで,省電力・高信頼・低遅延のネットワーキングの実現を目指す. そして,効率的にネットワーク機能を逐次実行するサービスチェイニングの確立も目指す4 5. 一方で,Networking for AIでは,データの収集,モデルの学習,モデルの推論を効果的に実現するために,ネットワークを設計することを目的としている. 具体的には,連合学習などの分散学習手法を効率的に実施する分散システムやクラウド・エッジネットワークの設計などの実現を目指す. さらに,セキュリティの観点から,異常トラヒックの高速かつ高度な検知方法をeBPFやXDPといったカーネルネットワーキングと組み合わせて実現することを目指す6.
-
H. Shimizu, T. Hara, and T. Iwata, “Deep Reinforcement Learning for Pedestrian Guidance,” in Proc. of PRIMA 2020: Principles and Practice of Multi-Agent Systems, T. Uchiya, Q. Bai, and I. Marsá Maestre, Eds., in Lecture Notes in Computer Science. Cham: Springer International Publishing, 2021, pp. 334–342. doi: 10.1007/978-3-030-69322-0_22. ↩︎
-
T. Hara, M. Sasabe, and S. Kasahara, “Multi-Agent Distributed Route Selection under Consideration of Time Dependency among Agents’ Road Usage for Vehicular Networks,” IEICE Trans. Commun., vol. E105.B, no. 2, pp. 140–150, Feb. 2022, doi: 10.1587/transcom.2021CET0001. ↩︎
-
T. Hara, M. Sasabe, and S. Kasahara, “Selfish Yet Optimal Routing by Adjusting Perceived Traffic Information of Road Networks,” IEEE Open J. Intell. Transp. Syst., vol. 1, pp. 120–133, 2020, doi: 10.1109/OJITS.2020.3019935. ↩︎
-
M. Sasabe and T. Hara, “Capacitated Shortest Path Tour Problem-Based Integer Linear Programming for Service Chaining and Function Placement in NFV Networks,” IEEE Trans. Netw. Serv. Manage., vol. 18, no. 1, pp. 104–117, Mar. 2021, doi: 10.1109/TNSM.2020.3044329. ↩︎
-
T. Hara and M. Sasabe, “Speedy and Efficient Service Chaining and Function Placement Based on Lagrangian Heuristics for Capacitated Shortest Path Tour Problem,” J Netw Syst Manage, vol. 31, no. 1, pp. 1–34, Dec. 2022, doi: 10.1007/s10922-022-09715-y. ↩︎
-
T. Hara and M. Sasabe, ‘‘On Practicality of Kernel Packet Processing Empowered by Lightweight Neural Network and Decision Tree,’’ to be presented at the International Conference on Network of the Future (NoF 2023), pp.1-9, Oct. 2023. (full paper). ↩︎